Autonomous Robot
Overview
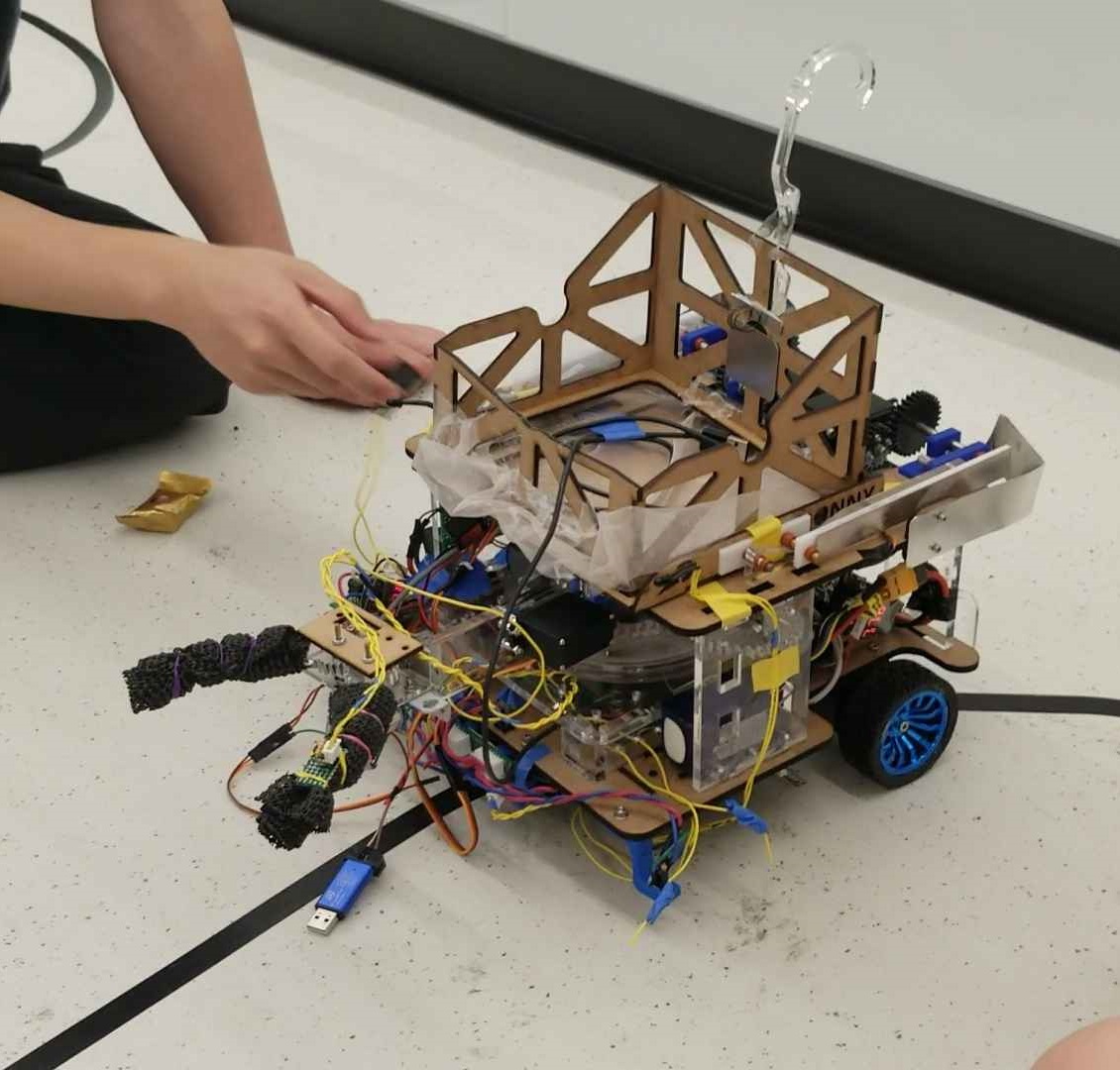
I, alongside three teammates, designed and built an autonomous robot from scratch capable of traversing an obstacle course filled with rough terrain, traps, and chasms. The goal: retrieve treasures and deliver them to the finish line for the Engineering Physics “Robot Summer” competition (full details here).
I primarily focused on:
- Designing and building the arm: A three-degree-of-freedom mechanical arm that extends up to 10 inches and rotates 60° to either side. I achieved this using servo motors, a stepper motor-driven rack and pinion, and a sonar sensor for precise treasure detection.
- High and low voltage power systems: Designed the power distribution circuits to ensure stable operation.
- H-bridge motor control: Soldered and configured circuits for bidirectional wheel movement using DC motors.
- Line-following control: Implemented and tuned PID algorithms using reflectance sensors for accurate path following.
This project showcased my skills in:
- Embedded systems
- Algorithm development
- Hardware design
- Integration of multiple technologies into a cohesive system
Check out the robot control code on GitHub!
Technologies and Tools
- Microcontrollers: STM32 Blue Pill
- Programming Languages: C++
- Development Environments: PlatformIO, VS Code
- Hardware: Ultrasonic sensors, IR sensors, reflectance sensors, hall effect sensors, DC motors, motor drivers, LiPo batteries
- Prototyping Tools: Onshape, 3D printer, waterjet cutter, laser cutter
Gallery